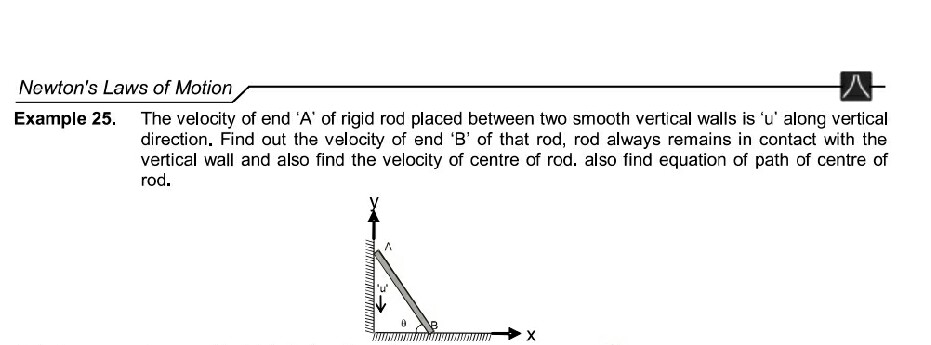
By rigid body constraints
usinθ=vcosθ ⇒v = utanθ Velocity of centre of mass =[u(-j^)+utanθ(i^)]/2 Let centre of rod is (x,y) ⇒2x2+2y2=L2
Enter Your Email :
Your Full Name :
Your Email Address :
Country :
State :